Business Process Optimization (BPO) module
Formal Specification
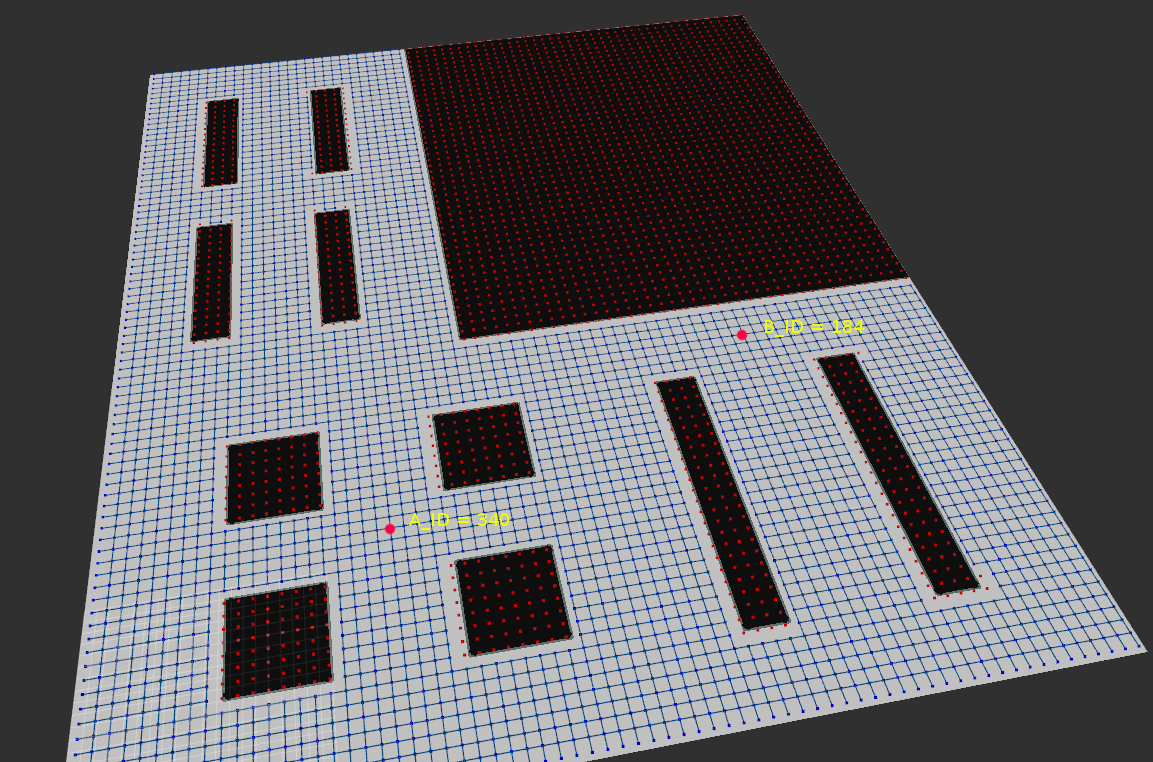
The BPO module is tasked with generating the optimal sequence of tasks based on the provided task specification. The task specification (tspec) is provided in the OPIL Task Specification Language. The tspec is then parsed by a parser in the Task Supervision module to generate the required input to BPO. The output of BPO is fed to the Task Supervisor in order to handle the task execution. As an example consider the following topology with two locations of interest (A and B). We assume that we want a worker to load items at location A to a robot and the robot to transport them to location B.
Input Requirements
Below is the input to the BPO to carry out the sought task.
Small letters are reserved as follows:
*: Anything (can only be used in the constraints definitions and in the objectives)
Reserved letters for positions:
v := Any undefined position
Reserved letters for Robots: r[Robot ID], i.e.:
r1, r2, …, rn
Reserved letters for Workers: w[Worker ID], i.e.:
w1, w2, …, wn
Reserved letters for Items: i[Item ID], i.e.:
i1, i2, …, in
Definition of locations
List of location IDs of interest (based on the topology).
Capital letters are for identifying location IDs.
A 340
B 184
Definition of transitions
Each x_Transitions statement indicates a partial state of the factory floor.
Allowed transitions for r1 implies that the first position in the state “word” will be #occupied by the location available through r1_transitions
r1_Transitions := ['AB', 'BA', 'vA', 'vB']
Allowed transitions for w1
w1_Transitions := ['AB', 'BA', 'vA', 'vB']
Allowed transitions for i1
i1_Transitions := ['Ar1', 'BA', 'r1B']
States Definition
We have now defined in this example 3-lettered words defining the state of the system. For example, if robot r1 is at location v, worker w1 is at location A and the item i1 is at location A, then the system state is [v][A][A]. Constraint transitions i1_transitions are the possible transitions for item i1. In the case below it is indicated that an item can only be loaded from position A on robot r1 if both the robot and worker are at position A and can only be unloaded in location B, if both robot and worker are at location B.
i1_constraints := [AAA : AAr1, **r1:**r1,BBr1:BBB]
Objective Definition
We can now define the objective of the BPO. For example, transport the item i to location B)
Objective := [**B]
Statement of the Output
The output of the BPO is an optimized sequence of states to achieve the Objective.
Below is the output received by the BPO.
[vvA:vAA:AAA:AAr1:ABr1:BBr1:BBB]